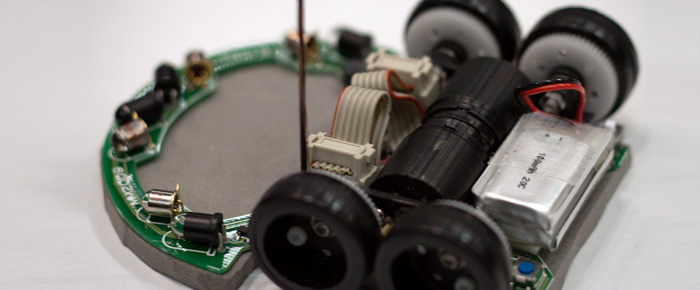
“All Japan Micromouse Robot Competition” ονομάζεται ένας διαγωνισμός ρομποτικής που διεξάγεται εδώ και 30 χρόνια με σχεδόν τους ίδιους κανονισμούς. Η ιδέα του διαγωνισμού είναι η κίνηση αυτόνομων ρομπότ μέσα σε ένα λαβύρινθο. Τα ρομπότ εξερευνούν το λαβύρινθο με σκοπό να τον χαρτογραφήσουν και στη συνέχεια προσπαθούν να τον διατρέξουν από την είσοδό του έως το κέντρο του όσο πιο γρήγορα γίνεται. Το ταχύτερο ρομπότ είναι και ο νικητής. Πέρσι ο μικρότερος χρόνος ήταν 6.4” και φέτος στον 30ο διαγωνισμό το TETRA micro-mouse (στις φωτογραφίες επάνω και κάτω) του Kato-san έκανε σε μία δοκιμαστική επίδειξη πριν τον διαγωνισμό 4,7 δευτερόλεπτα παρόλο που δεν κατάφερε να ολοκληρώσει το διαγωνισμό.---
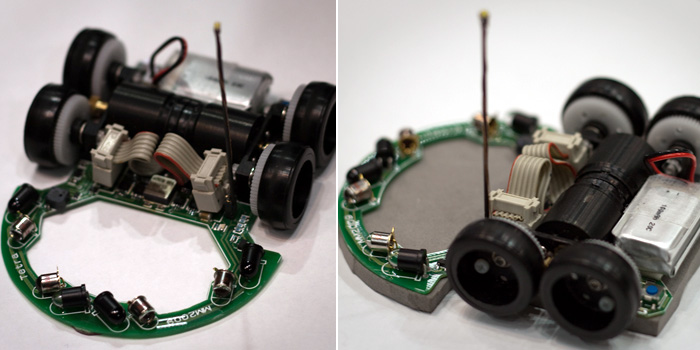
Το TETRA είναι ότι πιο σύγχρονο έχει να επιδείξει ο διαγωνισμός αυτός, ο οποίος συγκεντρώνει πολλά καινοτόμα ρομπότ. Χρησιμοποιεί δύο ζεύγη τροχών, πολύ κοντά τοποθετημένα και με ξεχωριστό ηλεκτροκινητήρα για κάθε τροχό. Το κέντρο βάρους είναι πολύ χαμηλά και το η κατανομή του είναι κυρίως στους εμπρός τροχούς. Όπως εξηγεί ο David Otten, βετεράνος του διαγωνισμού, σε αυτό το video, είναι πολύ ευέλικτο επειδή στις στροφές οι πίσω τροχοί έχουν πολύ μικρή κάθετη φόρτιση άρα η πλευρική τους πρόσφυση είναι επίσης πολύ μικρή. Έτσι το ρομπότ ουσιαστικά στις στροφές συμπεριφέρεται σαν να είχε μόνο 2 τροχούς, τους μπροστινούς. Κατά την επιτάχυνση η μεταφορά βάρους προς τα πίσω φορτίζει και τους 4 τροχούς παρέχοντας έτσι σταθερότητα. Στο βίντεο ο David Otten αναφέρει πως δεν γνωρίζουν ακριβώς τον μηχανισμό που επιτρέπει στο TETRA να φρενάρει εξίσου καλά αλλά λογικά αυτό οφείλεται στον πολύ μεγάλο εμπρός πρόβολο που δεν αφήνει το ρομπότ να τουμπάρει εμπρός σε απότομο φρενάρισμα ενώ επιτρέπει τους τροχούς να σύρονται επιβραδύνοντάς το χωρίς να αποσταθεροποιείται.
Το TETRA δεν ολοκλήρωσε το διαγωνισμό επειδή οι αισθητήρες με LED που χρησιμοποιεί για να ανιχνεύει τα τοιχώματα του λαβύρινθου (μετρώντας την αντανάκλαση του φωτός) μπερδεύονται από το φως του περιβάλλοντος. Ο δημιουργός του αναφέρει πως το θέμα αυτό λύνεται χρησιμοποιώντας έναν ειδικό αλγόριθμό ο οποίος συγκρίνει τα δεδομένα από όλους τους αισθητήρες και διαχωρίζει έτσι το περιβαλλοντικό φως από την αντανάκλαση των τοιχωμάτων στο φως των LED.
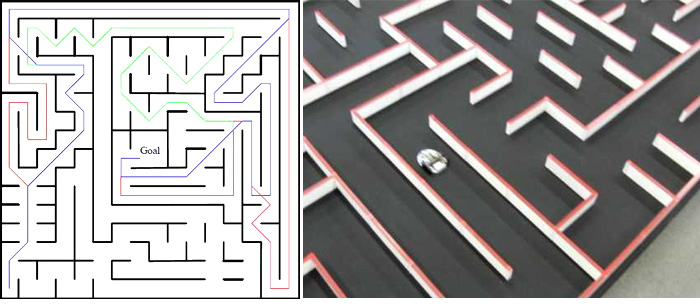
Οι εικόνες επάνω δείχνουν ένα πλάνο του λαβύρινθου και ένα στιγμιότυπο από τον διαγωνισμό. Τα ρομπότ αυτά είναι εκπληκτικά γρήγορα ειδικά αν κινούνται σε διαδρομή που θεωρούν γνωστή, δείτε τα παρακάτω βίντεο:
TETRA micro-mouse run
mouse-robot mapping the maze
(προσέξτε τη διαφορά ταχύτητας όταν είναι γνωστή η διαδρομή, via BotJunkie )
Some links:
Kato-san website (in Japanese)
robotspodcast.com/forum
botjunkie.com/
robots-dreams.com
(οι φωτογραφίες του TETRA από :robots-dreams.com flickr )