
Robotic arms that are destined to handle a wide variety of objects with different shape, robustness, surface finish, shape, size and weight are usually modeled after the human hand with elaborate fingers, grippers and stepper motors. A group from Cornell Cumputational Synthesis Laboratory comprised from researchers from Cornell, University of Arizona, iRobot and DARPA followed a completely different approach. They designed an extremely simple and cheap robotic gripper that is amazingly capable of handling objects. In the image above you can see on the left the gripper and on the right its main component, a simple party balloon filled with coffee grounds.---
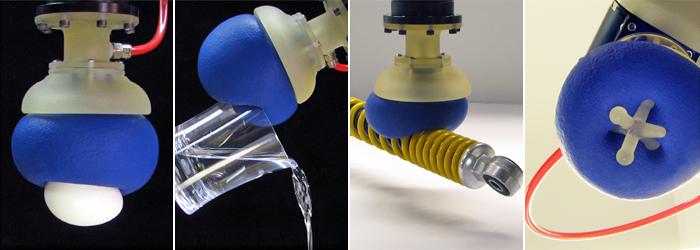
The basic idea takes advantage of the shape of coffee particles that because of their irregular and angular shape are interlocked under pressure but because of their light weight they become loose at rest. The gripper places a balloon filled with coffee grounds to a vacuum pump. You can see its function in the video below, the balloon is placed over an object and being loose it follows its shape and places itself around it. When vacuum is applied the balloon becomes firm while its volume is reduced only by 0.5% (thus retaining the shape and close grip of the object). A very accurate ‘negative mold’ is created and allows the gripper to apply a very precise, uniform, firm and stable grip.
[ytx="bFW7VQpY-Ik"]bFW7VQpY-Ik[/ytx]
Another video with yet more examples:
[ytx="Rna03IlJjf8"]Rna03IlJjf8[/ytx]
The potential of this new design is limitless. It has huge advantages, it is very simple and cheap and it eliminates a very large programming and control work by being inherently self adjustable. The only visible disadvantage could be the wear and tear of the balloon and/or particles but this is a proof of concept that uses ridiculously simple materials. Other applications may use more advanced materials and they will always should be very cheap to replace (even continuously).
More information in Cornell CSL website here: http://ccsl.mae.cornell.edu/jamming_gripper
( via BotJunkie, link1, link2 )