| Connectable 4WD by Ferrari |
The following analysis is based on a patent claimed by Ferrari, entitled "
Connectable Four-Wheel drive vehicle" (US2007/0221427), published in 2007. It describes an all wheel drive system in two configurations, a front engine
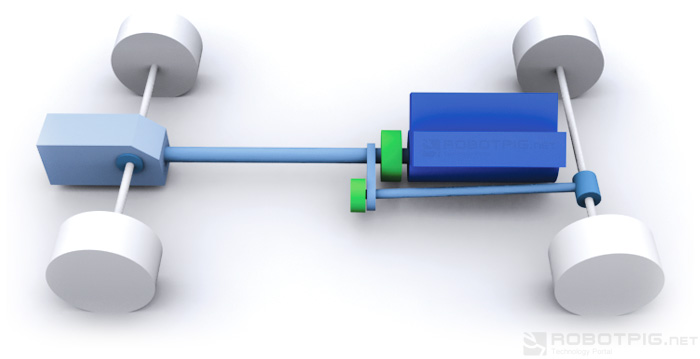
transaxle and a mid-engine both with the gearbox placed behind the rear differential. You can see the general layout in the sketches below.
The main idea is that in order to eliminate the need for a secondary propshaft connecting the gearbox with the front differential power is transferred to the front directly from the crankshaft via a geared electronically controlled clutch.
The power reaches the rear wheels through the conventional path of a gearbox and differential, however there is only one available gear ratio for the front wheels. The front clutch will be disengaged most of the times and the car will behave like a conventional rear-wheel drive. There are speed sensors for every wheel and the integrated electronic control can detect when the rear wheels turn faster than the front and engage the front clutch. However most times when the front clutch is engaged the front wheels will be over or under geared. Even if the gearing is similar to one of the main gearbox ratios then also 6 out of 7 times the front gearing will be mismatched.
The operating threshold of the system eliminates this inconvenience. The front clutch is engaged only for very brief time periods (possibly for fractions of a second) in order to stabilize the car and regain grip. Clutch slipping also will act as a -speed- buffer and the amount of slip most probably will be taken into consideration as an operating parameter. The system should be useful in the lower spectrum of the velocity span where the thrust on the wheels is big enough o overcome the grip. A rough estimation could place the gearing of the front driveshaft in the range of the second or third gear.
In many rear-biased four-wheel drive supercars like the Lamborghini Gallardo or Porsche 911 turbo the front axle only deals with a small amount (~20%) of the available power. Considering how popular the rear wheel drive versions of those cars are one can think that a 'lighter' system may be even better. The Ferrari system is designed to cope with an even smaller fraction and only in a restricted dynamic envelope. The power delivered in the front can act only as a stabilization factor and anti-spin measure for the rear wheels. On the other hand it is much simpler, lighter and very easy to package. Installed in what is essentially a rear-wheel drive car it can improve the dynamic behavior of the car without significant changes in the balance or packaging. If Ferrari's system is smooth enough (quite a difficult task) and effective it should retain the accuracy of a rear wheel drive car with -only- the essential benefits of four-wheel drive.
 (You can see above in lighter blue the additional mechanism of the four wheel drive)
(You can see above in lighter blue the additional mechanism of the four wheel drive)
This system would be impossible to work without advanced electronic control. The integrated dynamic control system control the ABS, ESP, rear active differential, the DCT gearbox and of course the front clutch. Without it this simplistic all wheel drive would have been impossible to operate efficiently or even safely.
It is worth noticing at this point that the transition during power shift between the two axles depends heavily on the medium that is used for this task (differential, clutch, etc), not only quantitatively but also qualitatively. A central differential with a locking mechanism (ex viscous coupling, torsen etc) allows a smooth power fluctuation at all times. A clutch that takes power from the gearbox (ex haldex) may lock the two axles at the same speed when fully locked but in-between its operation is stepped. Ferrari's system is the most challenging, not only it inherits the stepped transition of the clutch but by operating almost always at a -fixed- different speed it will be operated such a way as to produce
very brief (clutch controlled) thrust bursts to the front wheels. Again, the need for a very advanced electronic control and fast clutch actuator is apparent for a smooth operation.
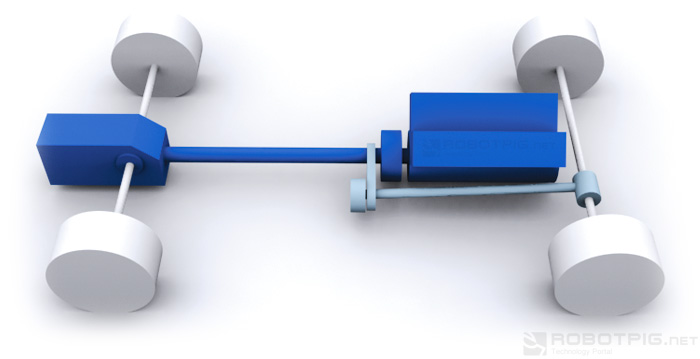 (You can see above in lighter blue the additional mechanism of the four wheel drive)
(You can see above in lighter blue the additional mechanism of the four wheel drive)
The FF is almost perfectly matched with this patent, in the near future when more information become available things will become clearer. Finally there is a possibility to create thrust vectoring and greatly improve the dynamic control of the vehicle by using a separate clutch for each wheel, in a way similar to Honda's 'acceleration device' used in ATTS / SH-AWD systems. However this will eliminate the simplicity of the system and will narrow the gap between 4RM and a conventional setup.