
DLR's institute of Robotics and mechatronics is developing one of the most advanced dexterous robotic arms and hands that combine accurate object manipulation, robustness and strength in a quite compact and light package. The robotic hand is inspired by the human one although anatomic fidelity isn't the main objective. It can handle small and fragile objects but it is also able to exert force of 30 newton at the fingertips. It is also able to survive a baseball bat hit (a 66 g impact!) while being relatively compact and light. The key of these arms amazing ability lies to its operating principle and its clever inner workings.---
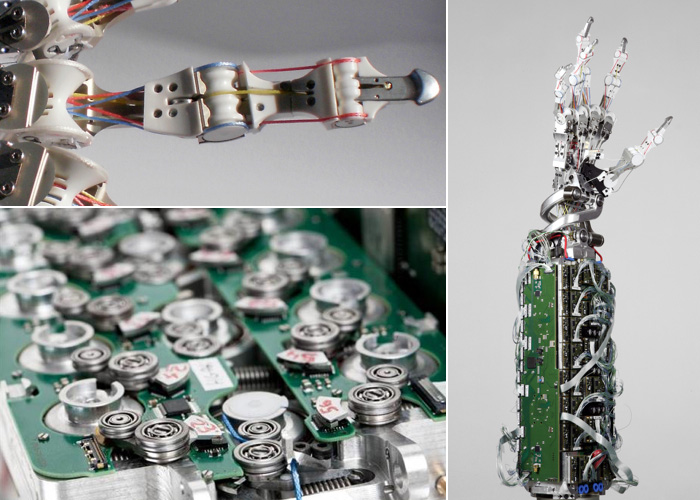
The fingers are held and operated by a web of 38 tendons made from a very strong polyethylene fiber. Each tendon is connected to an individual motor and also a spring. Both motors and springs are placed in the forearm. The parts that comprise the fingers are loosely interlocked but they are held together, shaped and move only by the tension of the fibers. There are no fragile connections; the elasticity of the spring and the very high tensile strength of the Dyneema fibers make it extremely robust.
Two tendons drive every joint, and the 38 tendons/motors allow a 19-degrees of freedom hand (one less than the human equivalent). When their motors turn in the same direction the joint rotates accordingly, when they turn in opposite directions the joint stiffens. Depending on the task the hand can be stiff (ex when it applies force) or loose (ex for handling small objects). The relative position is indirectly measured from the tendons spring load and although this method is not extremely accurate the built-in compliance compensates for this and the hand is able of handling very delicate objects.
[ytx="YqmRKqFqiok"]YqmRKqFqiok[/ytx]
This arm will be a part of a complete two-arm torso and researches are focusing on grasping and manipulations strategies and two-arms coordination. This innovative design approach will push robotic arms into service where their robustness will allow them to perform without today's restrictions.
For more details:
IEEE-Automaton Blog
DLR - Institute of Robotics and Mechatronics
This post was written for http://www.robotspodcast.com/