
Το ινστιτούτο ρομποτικής και μηχανοτρονικής του DLR εξελίσσει έναν από τους πιο επιδέξιους ρομποτικούς βραχίονες ο οποίος συνδυάζει ακριβή χειρισμό αντικειμένων, μεγάλη ανθεκτικότητα και δύναμη σε ένα συμπαγές και ελαφρύ πακέτο. Το ρομποτικό χέρι είναι μεν εμπνευσμένο από το ανθρώπινο αλλά η ανατομική πιστότητα δεν είναι ο κύριος σκοπός του. Μπορεί να διαχειριστεί μικρά και εύθραυστα αντικείμενα ενώ ταυτόχρονα μπορεί να ασκήσει στα ακροδάκτυλα δύναμη 30 newton. Επίσης μπορεί να επιβιώσει από χτύπημα με ρόπαλο (σε επιβράδυνση 66g!) χωρίς να είναι υπερβολικά βαρύ ή ογκώδες. Το κλειδί για αυτές τις εκπληκτικές ιδιότητες είναι η αρχή λειτουργίας του και ο ευφυής εσωτερικός του μηχανισμός.---
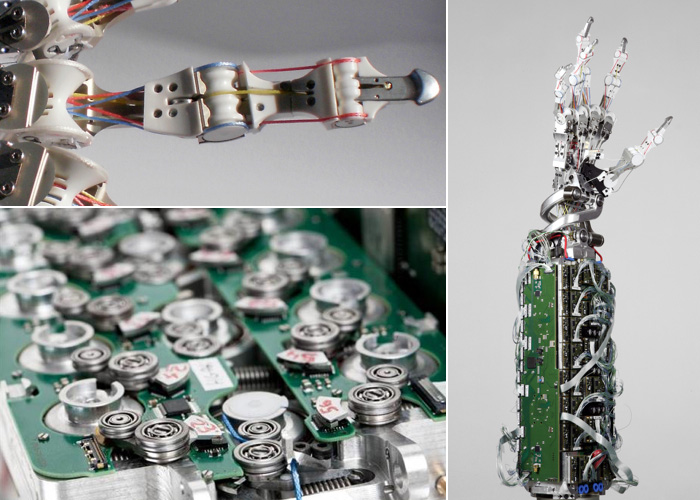
Τα δάχτυλα συγκρατούνται και ελέγχονται από ένα δίκτυο 38 ‘τένοντων’ οι οποίοι είναι νήματα από πολύ ανθεκτικό πολυεθυλένιο. Κάνε νήμα/τένοντας συνδέεται με έναν ξεχωριστό ηλεκτροκινητήρα και ένα ελατήριο. Όλοι οι κινητήρες και τα ελατήρια είναι τοποθετημένοι στον βραχίονα. Τα τμήματα που αποτελούν τα δάχτυλα είναι συνδεδεμένα χαλαρά και μένουν ενωμένα, αποκτούν μορφή και κινούνται μόνο από την μεταβλητή τάση των νημάτων. Δεν υπάρχουν εύθραυστες αρθρώσεις, η ελαστικότητα των ελατηρίων και η υψηλή αντοχή σε εφελκυσμό των ινών Dyneema κάνουν όλη την κατασκευή εξαιρετικά ανθεκτική.
Δύο τένοντες χρησιμοποιούνται σε κάθε ένωση και συνολικά οι 38 τένοντες/κινητήρες δίνουν 19 βαθμούς ελευθερίας (1 λιγότερο από το ανθρώπινο χέρι). Όταν οι δύο κινητήρες κάθε ένωσης στρέφονται προς την ίδια κατεύθυνση τότε η ένωση κινείται ανάλογα. Όταν οι κινητήρες στρέφονται ανάποδα τότε η ένωση γίνεται άκαμπτη. Ανάλογα τις απαιτήσεις το ρομποτικό χέρι μπορεί να είναι σκληρό (πχ όταν ασκεί δύναμη) ή εύκαμπτο (πχ όταν χειρίζεται μικρά αντικείμενα). Η σχετική θέση υπολογίζεται από την τάση του ελατηρίου κάθε τένοντα και αν και αυτή δεν είναι η πιο ακριβής μέθοδος η εγγενής ενδοτικότητα υπερκαλύπτει το θέμα αυτό και ο βραχίονας μπορεί να χειριστεί πολύπλοκα και εύθραυστα αντικείμενα.
[ytx="YqmRKqFqiok"]YqmRKqFqiok[/ytx]
Ο βραχίονας θα αποτελέσει τμήμα ενός ολοκληρωμένου συστήματος με κορμό και δύο χέρια. Οι ερευνητές εστιάζουν σε στρατηγικές αρπαγής και χειρισμού αντικειμένων αλλά και συντονισμού των δύο βραχιόνων. Αυτή η καινοτόμα προσέγγιση θα ωθήσει τους ρομποτικούς βραχίονες σε εφαρμογές όπου η ανθεκτικότητά τους θα τους επιτρέψει να λειτουργούν χωρίς τους σημερινούς περιορισμούς.
Για περισσότερα:
IEEE-Automaton Blog
DLR - Institute of Robotics and Mechatronics
Η δημοσίευση αυτή έγινε για την ιστοσελίδα http://www.robotspodcast.com/